Research
Recent Outcomes
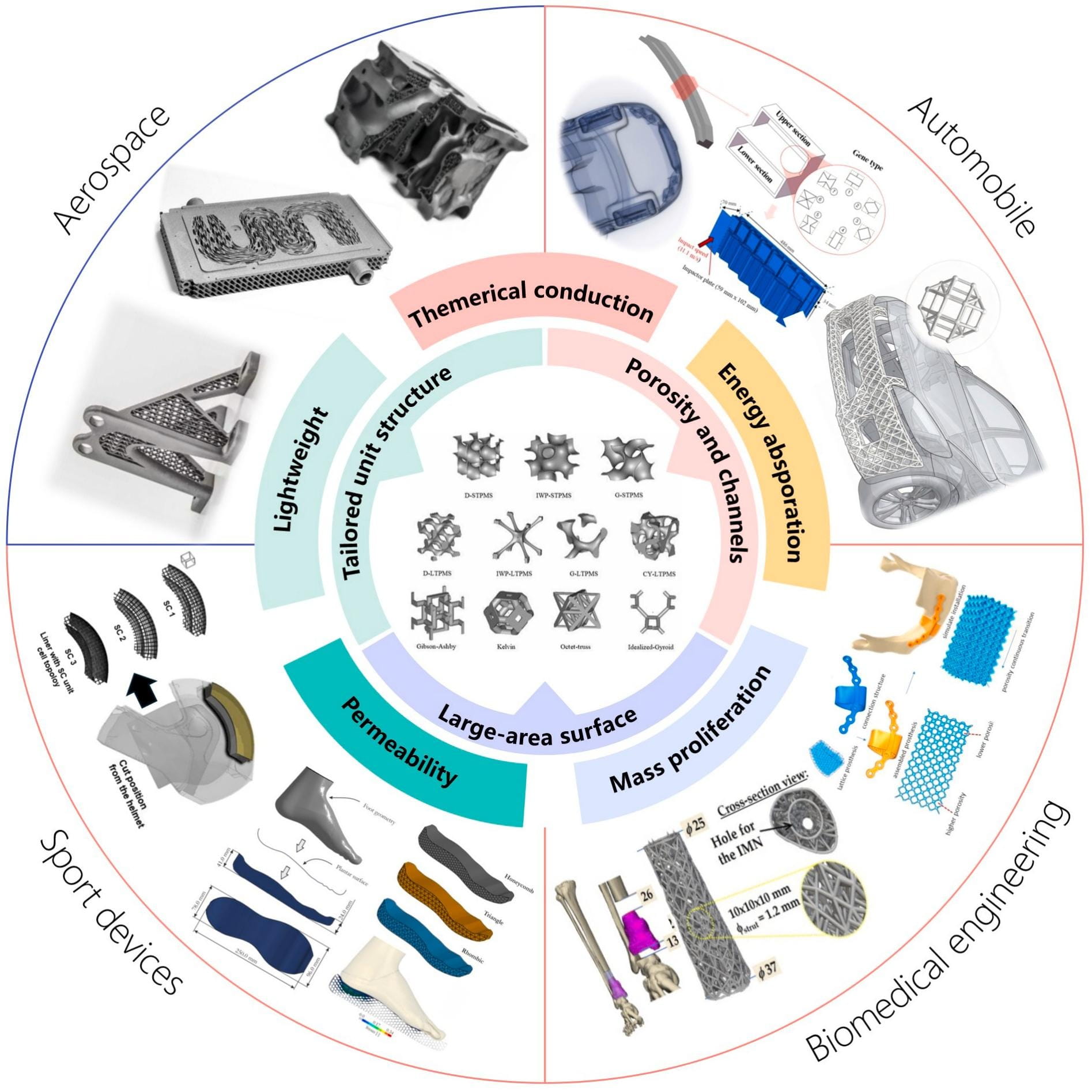
Generative Design Strategies for Additive Manufacturing of Lattice Structures: A Review
F.Liu, Y.Shao, M.Chen
This review integrates geometry generation, performance evaluation, and optimization into a unified multi-scale workflow and highlights two complementary directions of generative design for additive manufacturing: physical model-based and data-driven methods.
TranTac: Leveraging Transient Tactile Signals for Contact-Rich Robotic Manipulation
Y. Wu, S. Hou, H. Zheng, Y. Li, W. Lu, X. Zhou, Y. Shao
We introduce a data-efficient and low-cost tactile sensing and control framework that integrates a single contact-sensitive sensor within the elastomeric tips of a robotic gripper for completing fine insertion tasks.
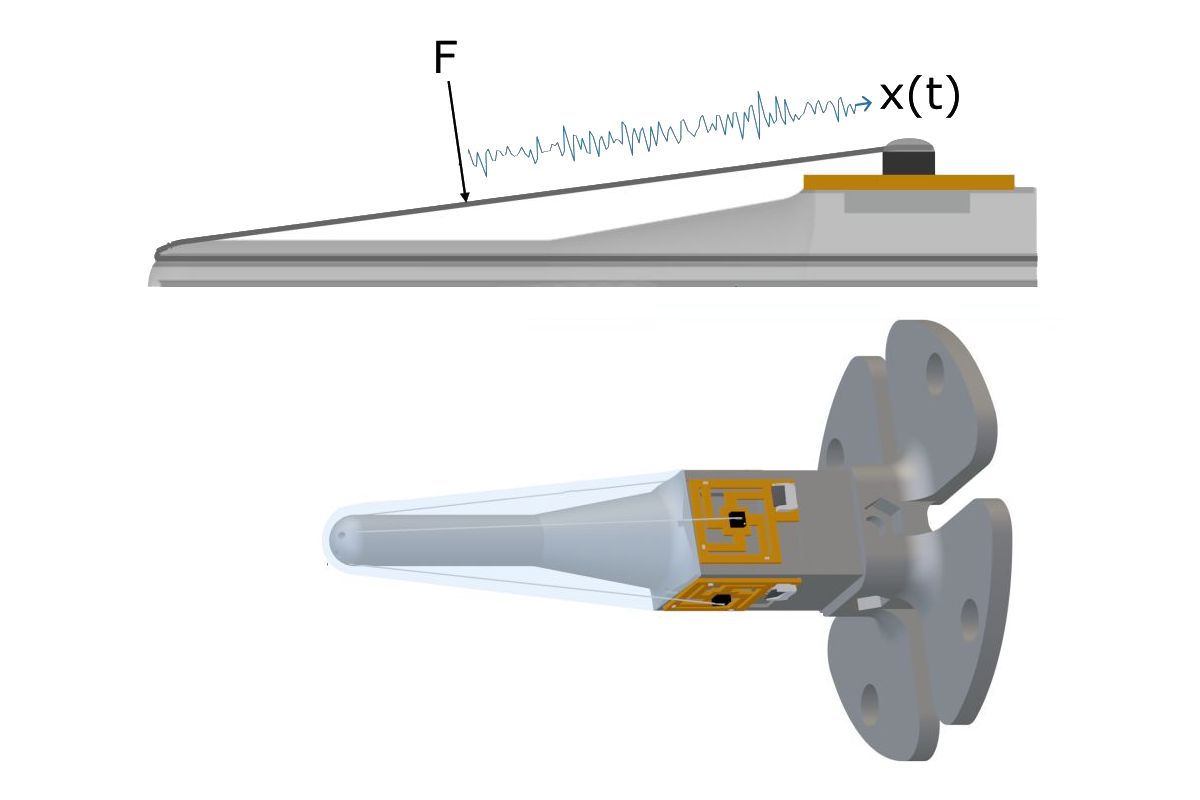
Distributed Contact Sensing Enabled by Vibration Propagation on Robot End-Effector
W. Tan, Y. Shao
We present a tactile sensing method that employs a single accelerometer to localize contact and estimate force across a wide surface area, enabling more delicate robotic manipulation while reducing hardware costs, system complexity, and sensing data requirements.
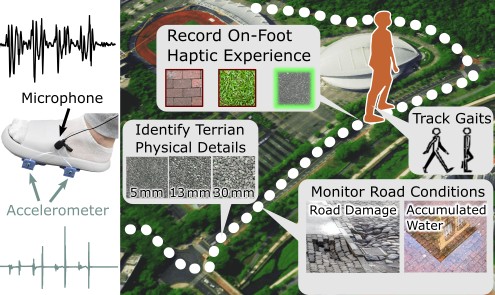
VibWalk: Mapping Lower-limb Haptic Experiences of Everyday Walking
Y. Shih, D. Tang, W. Hu, S. H. Yoon, Y. Shao
We propose a foot wearable system that records wideband vibration signals during everyday walking, enabling location-based mapping of haptic data related to ground materials, limb activity, and road conditions.
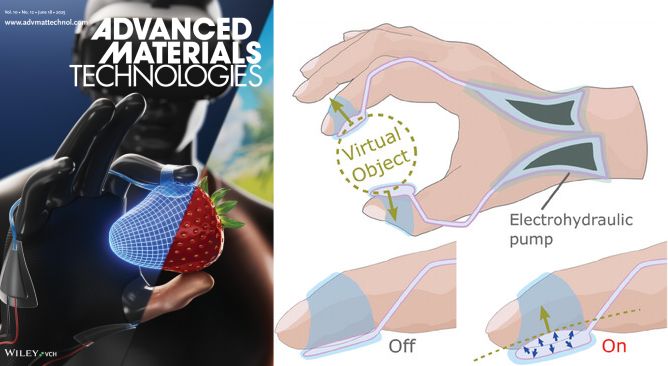
Wearable Electrohydraulic Actuation For Salient FullFingertip Haptic Feedback
Y.Shao*, A. ShaganShomron*, B. Javot, C.Keplinger#, K.J.Kuchenbecker#
We introduce a wearable electrohydraulic haptic system that delivers salient full-fingertip feedback via a thin inflatable chamber actuated by a soft pump. The lightweight, untethered design allows natural hand motion while producing lifelike pressure levels and skin deformation, enhancing immersion in extended reality applications.
















